服務熱線:025-52313235
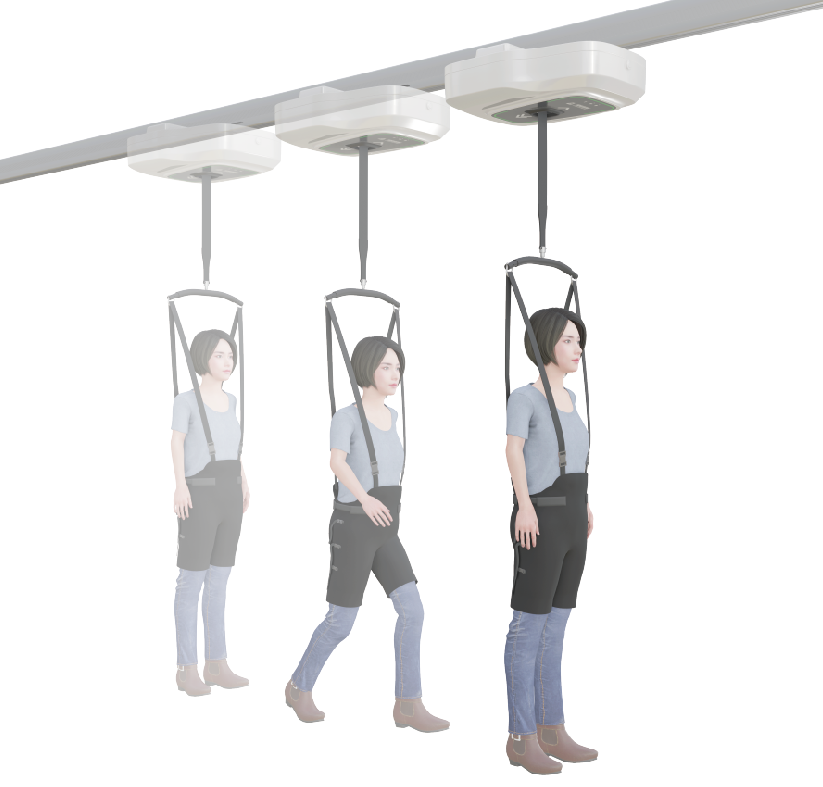
| 步行反饋自適應康復系統 (步行康復機器人) |
| 時間:2020-07-31 16:00:03 點擊: 次 |
根據自適應控制理論,運用人工智能算法,建立運動控制數學模型,將人工智能學習技術賦予實時反饋的運動康復訓練中,讓康復患者獲得更優化的步行體驗感,通過運動再學習的方式幫助患者恢復步行能力。
一、自適應控制理論 自適應控制是機器識別目標、反饋信息、發出與目標實時狀態相匹配指令并做出改變的過程。自適應控制的對象及其環境的數學模型不是完全確定的,甚至是未知因素和隨機因素。因此,系統需實時對被控制對象或過程的狀態、性能、參數等進行數據捕捉,并將當前數據和期望數據進行快速比對、整合,再做出改變系統狀態參數或控制方法等決策,根據需要不斷的調節自適應,使系統輸出滿足要求,同時維持系統的穩定。
1、實時動態感應補償 步行訓練時,患者運動方式、軌跡以及重心實時動態變化, 系統可以實時自動識別減重拉力變化,實時拉力補償,保持實時拉力恒定,既保護了患者安全,又大大提升了步行過程的舒適度。 2、全軌供電 軌道內置供電裝置,實時給機頭提供電能,安全、持久,高效;
? 開放式褲型設計,肢體障礙患者不同體位下(站姿、坐姿、臥位)均方便穿脫,節約時間,提升效率。 ? 精心定制材質和人體工程學相結合,避免了減重下步行過程中襠部受力疼痛,舒適感大大提升。 ? 多款型號,更貼心的關懷。
三、六大訓練模式 1、定速訓練模式:根據患者的能力設定恒定的步行速度,按此目標循序漸進,實現步行能力提升。
2、智能跟隨訓練模式:系統可實時讀取患者的步行方向、速度等參數,自動調整系統運行參數,主動跟隨,實現人機合一。
3、上下臺階訓練模式:患者做上下臺階及坡道步行訓練過程中,系統自動識別患者上下臺階狀態,始終保持恒定拉力。
4、動態平衡訓練模式:系統可以實現坐站訓練、離心向心訓練、站立位動靜態平衡能力訓練等多種訓練。也可滿足治療師設計的多種個性化訓練方案。
5、全地形情景模擬訓練模式:設置真實的草地、軟地面、崎嶇地面、障礙物地面等,通過多場景步行訓練方案組合,提高患者本體感覺輸入,實現真正獨立步行能力的恢復。
6、情景互動訓練:1)配合工作站,可進行超過20款專業情景互動游戲訓練,增強訓練趣味性,改善患者認知能力;2)訓練處方功能,可設置個性化康復方案。
四、功能優勢 1、安全“防”“護” 安全的訓練環境:系統提供了安全的訓練環境,建立了患者的自信心,同時也解放了治療師雙手,可以專注于個性化訓練方案制定并高質量的完成。 防跌倒保護:若患者突然發生跌倒等意外時,系統會在患者失去重心前的瞬間識別并快速保護患者,通過緩慢增加拉伸力,輔助患者站立,讓患者處于安全狀態。 制動保護:系統設有緊急停止裝置,當遇到意外故障等情況發生時可輕拉緊急拉繩,緩慢釋放保護吊帶,讓患者平穩安全回歸正常體位。
2、智能工作站管理 電腦工作站管理患者信息、訓練模式參數設置,單次和多次訓練效果數據比對分析,改善訓練方案;云康復功能,實現數據存儲、數據管理、大數據分析、數據導入導出、系統遠程維護更新等。 強大的患者數據庫和評估功能 ? 可以實現患者檔案管理; ? 強大的評估模塊: Berg平衡量表,up-go test步行訓練量表、全身關節活動度測量等;
3、雙控操作模式 系統搭載無線操作手控器和電腦工作站雙控模式,指令真人語言播報 無線手控器一鍵觸摸選擇訓練模式、訓練時間、減重重量等,參數任意設置,操作簡單。 無線手控器和智能工作站管理,可以實時無線協同操作,也可以分別單獨操作控制機頭。
五、適應范圍 神經系統康復:腦血管疾病、腦外傷、脊髓損傷等患者步行訓練; 骨關節系統康復:關節置換術后、骨折、截肢、運動創傷等患者步行訓練; 老年康復:帕金森患者、行動不便的老年患者步行訓練; 其他康復:肥胖患者步行訓練。
六、禁忌癥 下肢骨折未愈合或關節損傷處于不穩定階段,有嚴重出血傾向,體位性低血壓,嚴重骨質疏松癥,嚴重認知功能障礙等患者。
? 獨立的賬戶及登錄密碼,管理員與操作員權限分開,維護系統安全; ? 數據實時更新上傳至存儲器,節省設備系統內存,提升系統運行速度; ? 康復數據檢索、統計、分類、分析及導出,為大數據提供科學依據,讓科研、教學更省力; ? 物聯網技術,與其他設備互聯互通,數據實時交互共享,大康復無縫連接,助力三級康復體系建立; ? 遠程診斷,故障排除,系統更新。 |
| 上一篇:懸吊康復系統(成人型) 下一篇:智能天軌系統 |

綠柏客服

官方微信公眾號


 二、技術創新
二、技術創新 3、
3、




 七、云存儲(選配)
七、云存儲(選配)